Pro změnu pohybu motoru nám slouží ve firmwaru část kódu.
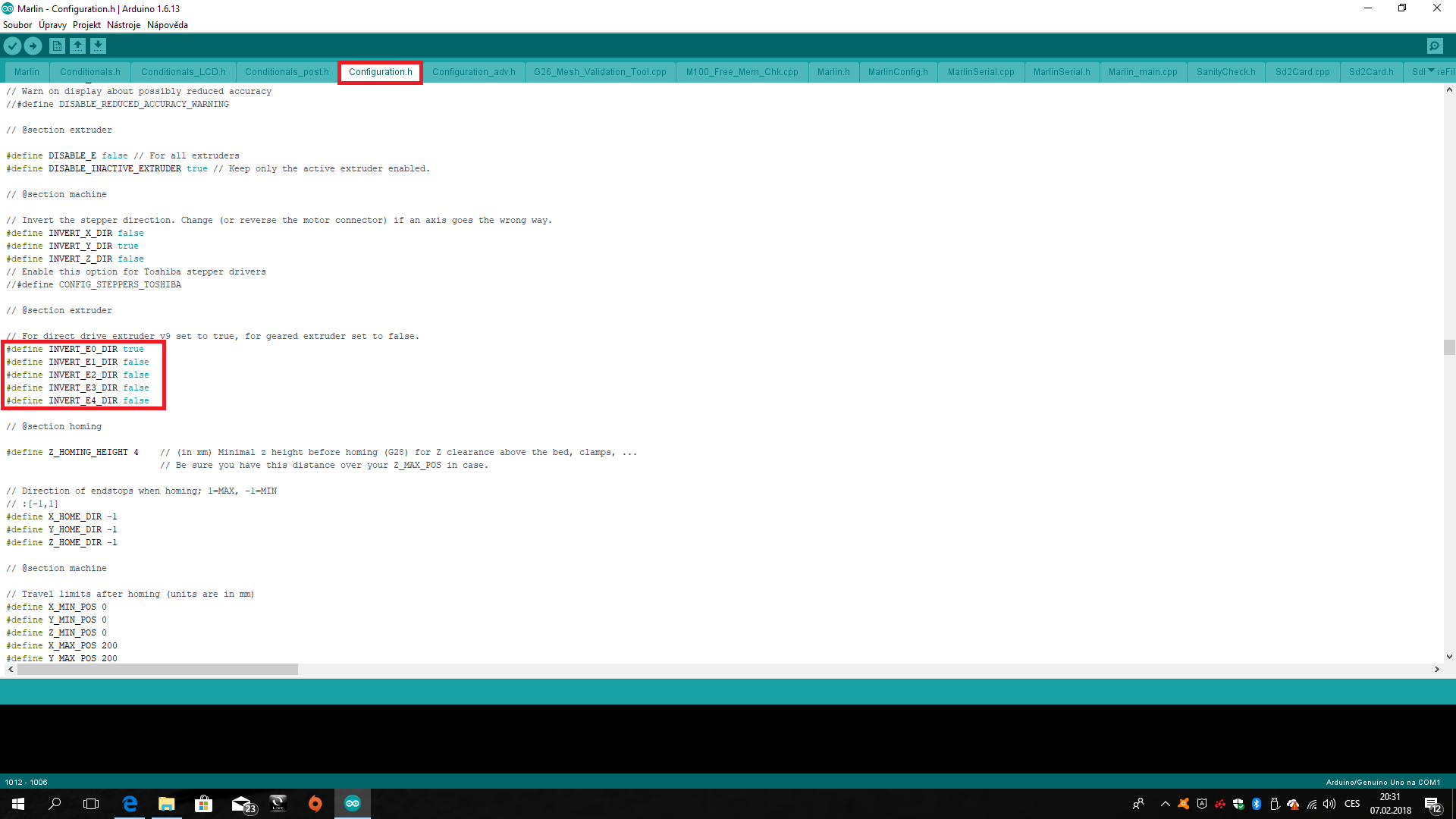
Původní část kódu před upravením
#define INVERT_E0_DIR true
#define INVERT_E1_DIR false
#define INVERT_E2_DIR false
#define INVERT_E3_DIR false
#define INVERT_E4_DIR false
Upravená část kódu
#define INVERT_E0_DIR false
#define INVERT_E1_DIR false
#define INVERT_E2_DIR false
#define INVERT_E3_DIR false
#define INVERT_E4_DIR false
Pro otočení směru firmwarů stačí upravit #define INVERT_E0_DIR na False a extruder bude fungovat opačným směrem. Pokud by jsme měli víc Extruderů tak budeme upravovat více částí kódu (#define INVERT_E1_DIR atd…) pokud by jsme chtěli měnit směry. Pak už stačí uložit změny a nahrát pomocí aplikace (Arduino IDE) firmware do základní desky.
Ukázka kódu v aplikaci